QEMU_(Quick_Emulator)
- 하드웨어(프로세서, 메모리 등)를 가상화하거나 Emulation하는 오픈 소스 소프트웨어이다.
- 무료, 공개 소스, x86, ARM, PowerPC, RISC-V
- Emulator : 상이한 프로세러를 동작을 모사하여 작동하는 시스템
- 다른 아키텍처의 CPU까지 소프트웨어적으로 모사 가능
바이너리 설치 프로그램
https://qemu.weilnetz.de/w64/
QEMU for Windows – Installers (64 bit)
QEMU Binaries for Windows (64 bit) Here you get QEMU related binaries for 64 bit versions of Microsoft Windows. Name Last modified Size Description Parent Directory - 2011/ 2016-04-15 10:48 - experimental QEMU for Windows 2012/ 2016-04-15 10:48 - experimen
qemu.weilnetz.de
소스 코드 및 make
qemu-w64-setup-20250422.exe
virsion 10.0.0
수작업으로 PATH 설정
C:\Program Files\qemu
설치 버전 확인
qemu-system-arm --version
// arm 32 bit
qemu-system arm
// arm 64 bit
qemu-system-aarch64
// 지원되는 프로세서의 목록 확인
-cpu help
// 지원되는 보드의 목록 확인
- machine help
raspberrypi.com 에서 pi os 64 lite 다운로드
WSL Ubuntu로 접속
압축 풀기
unxz 2025-05-13-raspios-bookworm-arm64-lite.img.xz
파티션 확인
fdisk -l 2025-05-13-raspios-bookworm-arm64-lite.img
img Mount
mount된 drive
mkdir pi_img
fdisk -l 2025-05-13-raspios-bookworm-arm64-lite.img pi_imgmount된 드라이브에서 커널 복사, 디바이스트리(dtb)
cp kernel8.img bcm2710-rpi-3-b.dtb ..
cd ..mount 해제
sudo umount pi_img
PowerShell에서 작업
qemu-img resize -f raw 2025-05-13raspios-bookwowm-arm64.img 4G
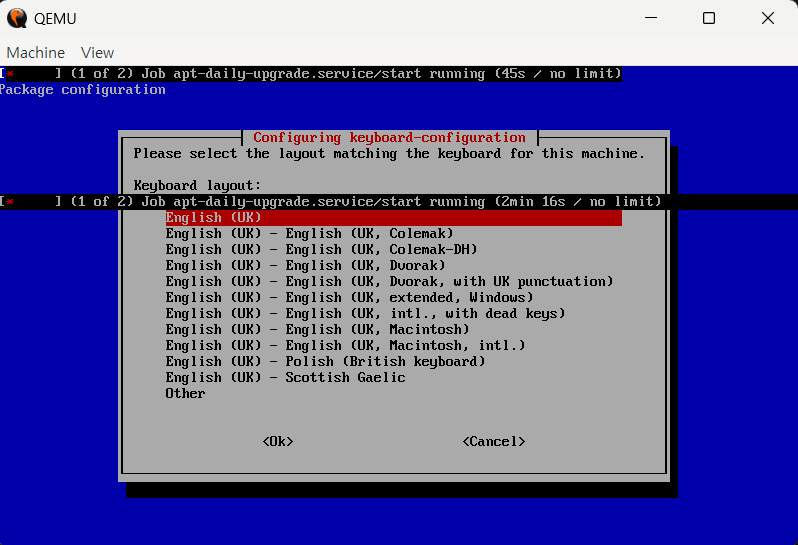
실행
qemu-system-aarch64 -machine raspi3b -cpu cortex-a53 -smp 4 -m 1G -kernel kernel8.img -dtb bcm2710-rpi-3-b.dtb -sd 2025-05-13-raspios-bookworm-arm64-lite.img -append "root=/dev/mmcblk0p2 rw rootwait rootfstype=ext4" -usbdevice keyboard -usbdevice mouse -device usb-net,netdev=net0 -netdev user,id=net0,hostfwd=tcp::2022-:22rootfstype=ext4" -usbdevice keyboard -usbdevice mouse -device usb-net,netdev=net0 -netdev user,id-net,hostfwd=tcp::2022-:22

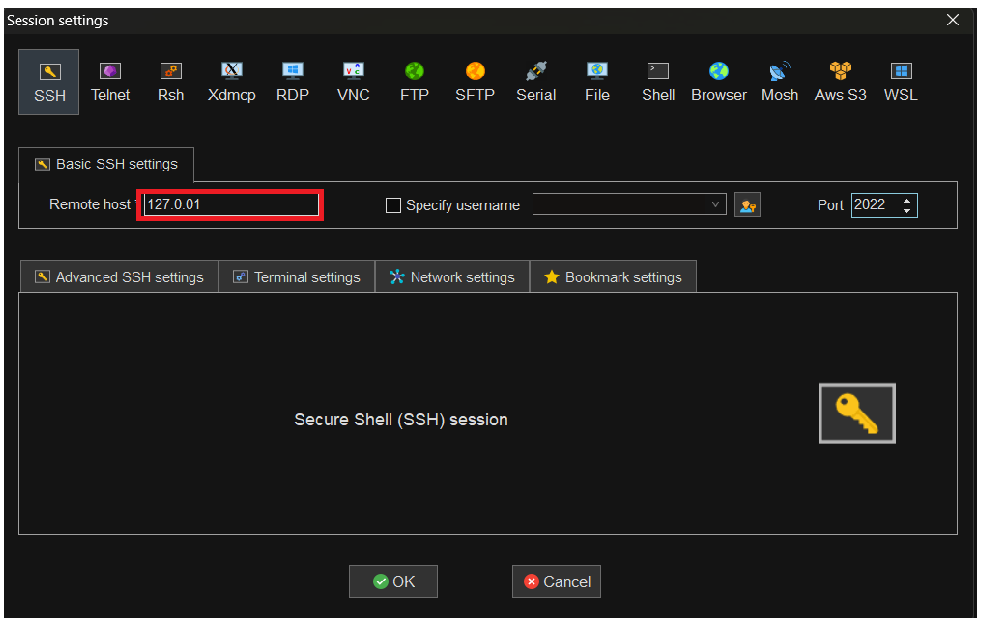
sudo raspi-config로 ssh활성
powershell에서 ssh pi@127.0.0.1 -p 2022
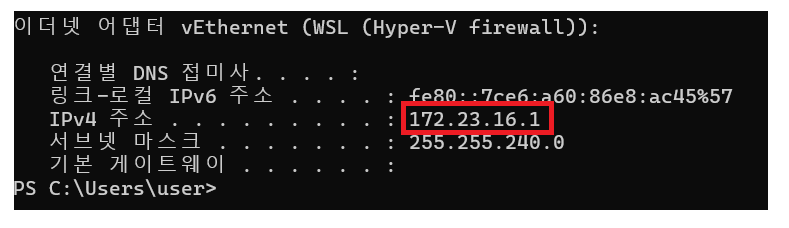
WSL Ubuntu 로 사용하기
WSL ip config

로그인 후 사용 시작

새로운 폴더 생성
cd c_project
mkdir led_kernel
cd led_kernel
Raspberry Pi 리눅스 커널에 맞는 헤더 파일
sudo apt-get install -y build-essential raspberrypi-kernel-headers git
코드 작성

- nano 사용시 -l 을 포함하면 코드 번호 ON
led_blink.c 코드
#include <linux/module.h> // 커널 모듈 관련 API
#include <linux/gpio.h> // GPIO 제어 관련 API (현재 코드에서는 GPIO는 직접 제어하지 않음)
#include <linux/delay.h> // msleep 등 지연 함수
#include <linux/kthread.h> // 커널 스레드 생성/제어 API
#include <linux/sched.h> // 스케줄링 관련 API (스레드 상태 확인 등)
// 커널 스레드를 위한 task_struct 포인터
static struct task_struct *blink_thread;
// 스레드에서 주기적으로 실행되는 함수
// 매 3초마다 "HELLO Kernel" 메시지를 커널 로그에 출력
static int blink_function(void *data) {
while (!kthread_should_stop()) { // 스레드 종료 요청이 들어올 때까지 반복
printk(KERN_INFO "HELLO Kernel\n"); // 커널 로그에 메시지 출력
msleep(3000); // 3초 동안 스레드 sleep
}
return 0; // 스레드 종료 시 0 반환
}
// 모듈 로드 시 호출되는 초기화 함수
static int __init led_blink_init(void) {
int ret;
printk(KERN_INFO "LED Blink Module Init\n"); // 모듈 초기화 로그
// blink_function을 실행하는 커널 스레드 생성
blink_thread = kthread_run(blink_function, NULL, "blink_thread");
// 스레드 생성 실패 시 에러 처리
if (IS_ERR(blink_thread)) {
printk(KERN_ERR "Failed to create thread\n");
return PTR_ERR(blink_thread);
}
return 0; // 초기화 성공
}
// 모듈 제거 시 호출되는 정리 함수
static void __exit led_blink_exit(void) {
printk(KERN_INFO "LED Blink Module Exit\n"); // 모듈 제거 로그
// 스레드가 실행 중이면 스레드 종료 요청
if (blink_thread)
kthread_stop(blink_thread);
}
// 모듈 초기화, 제거 함수 지정
module_init(led_blink_init);
module_exit(led_blink_exit);
// 모듈 메타 정보
MODULE_LICENSE("GPL"); // 라이선스 (GPL 필수, 상업적 사용 가능)
MODULE_AUTHOR("iot"); // 작성자 정보
MODULE_DESCRIPTION("Blink LED on GPIO 17"); // 모듈 설명 (실제로는 GPIO 17 제어 코드 없음)Makefile 코드 설정
// led_blink.c 파일을 컴파일하여 led_blink.ko 모듈을 만든다는 의미
obj-m += led_blink.o
// 현재 커널의 빌드 디렉토리 경로 지정
KDIR := /lib/modules/$(shell uname -r)/build
// 현재 작업 디렉토리 (모듈 소스 파일이 있는 디렉토리)
PWD := $(shell pwd)
// 'make' 실행 시 호출되는 기본 빌드 규칙
all:
// 커널 빌드 시스템을 호출하여 현재 디렉토리(PWD)에 있는 모듈을 빌드
$(MAKE) -C $(KDIR) M=$(PWD) modules
// 'make clean' 시 호출되는 규칙 (빌드 파일들 정리)
clean:
// 커널 빌드 시스템을 호출하여 생성된 모듈 파일, 중간 파일 삭제
$(MAKE) -C $(KDIR) M=$(PWD) clean
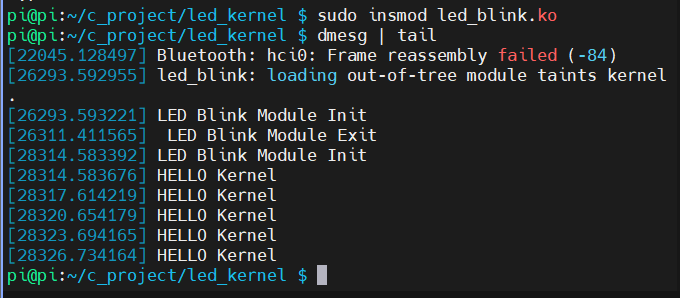
실행
sudo insmod led_blink.ko
// led_blink.ko 커널 모듈을 커널에 삽입 (로드)
// 커널 공간에 모듈 코드를 올리고 init 함수 실행
dmesg | tail
// 최근 커널 로그의 마지막 10줄 출력
// 모듈 로드 시 printk로 출력된 초기화 메시지나 상태 확인
sudo rmmod led_blink.ko
// led_blink.ko 커널 모듈을 커널에서 제거 (언로드)
// 모듈의 exit 함수가 호출되고 리소스 정리
dmesg | tail
// 최근 커널 로그의 마지막 10줄 출력
// 모듈 제거 시 출력된 메시지나 상태 확인
실행 확인
'ARM_core 기반 리눅스 BSP 개발 > Raspberry_PI Kernel build' 카테고리의 다른 글
| [Raspberry_PI]_Square Matrix / Sparse Matrix (1) | 2025.06.25 |
|---|---|
| [Raspberry_PI]_Kernel Thread-Based LED Blinking in Linux (0) | 2025.06.25 |
| [Raspberry_PI]_GPIO PIN 제어 (1) | 2025.06.18 |
| [Raspberry_PI]_SDcard_수동Mount (0) | 2025.06.18 |
| [Raspberry_PI]_Linker_Script (0) | 2025.06.17 |